領(lǐng)先的數(shù)字化應(yīng)用服務(wù)商
400-999-3607
- 首頁
-
產(chǎn)品中心
-
工廠數(shù)字化
工業(yè)互聯(lián)網(wǎng)平臺 物聯(lián)網(wǎng)平臺 大數(shù)據(jù)平臺 企業(yè)大腦平臺 安全監(jiān)測平臺 綜合能源管理平臺 智慧水利平臺 -
工業(yè)物聯(lián)
智能運維系統(tǒng) 園區(qū)環(huán)境監(jiān)測系統(tǒng) 無人值守系統(tǒng) 安燈呼叫系統(tǒng) 智能稱重系統(tǒng) 智能電子看板系統(tǒng) -
智能硬件
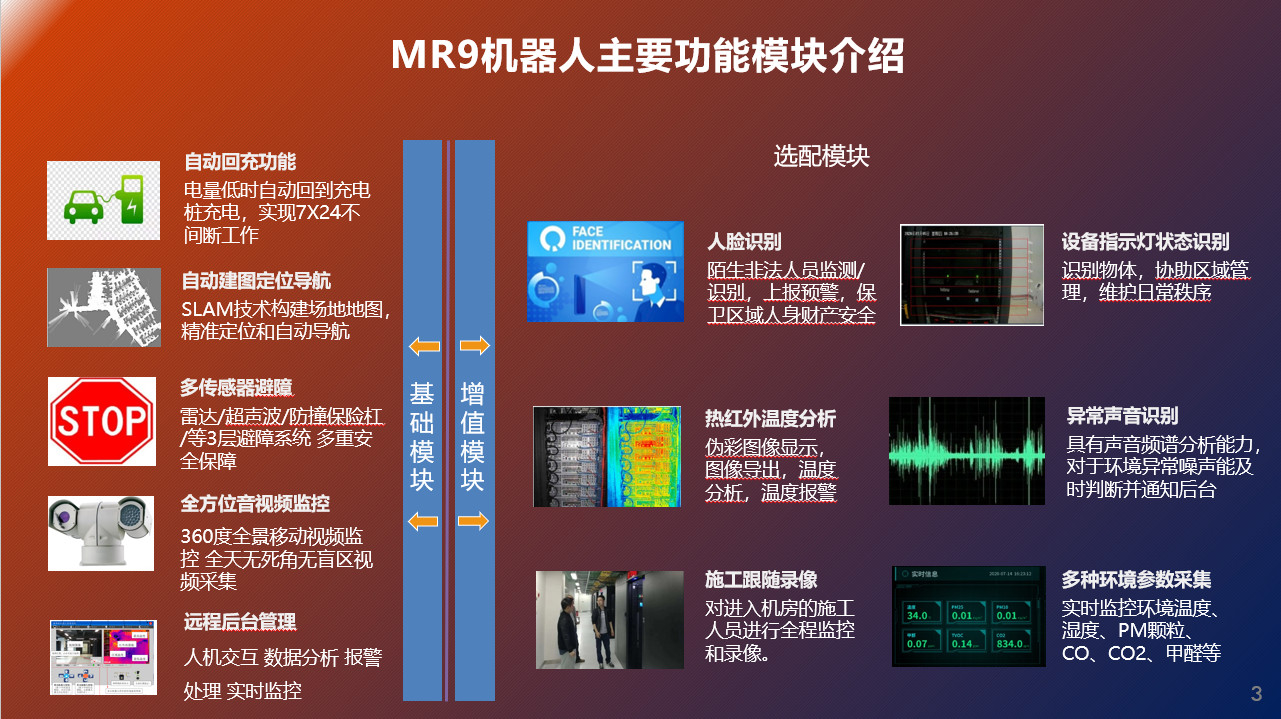
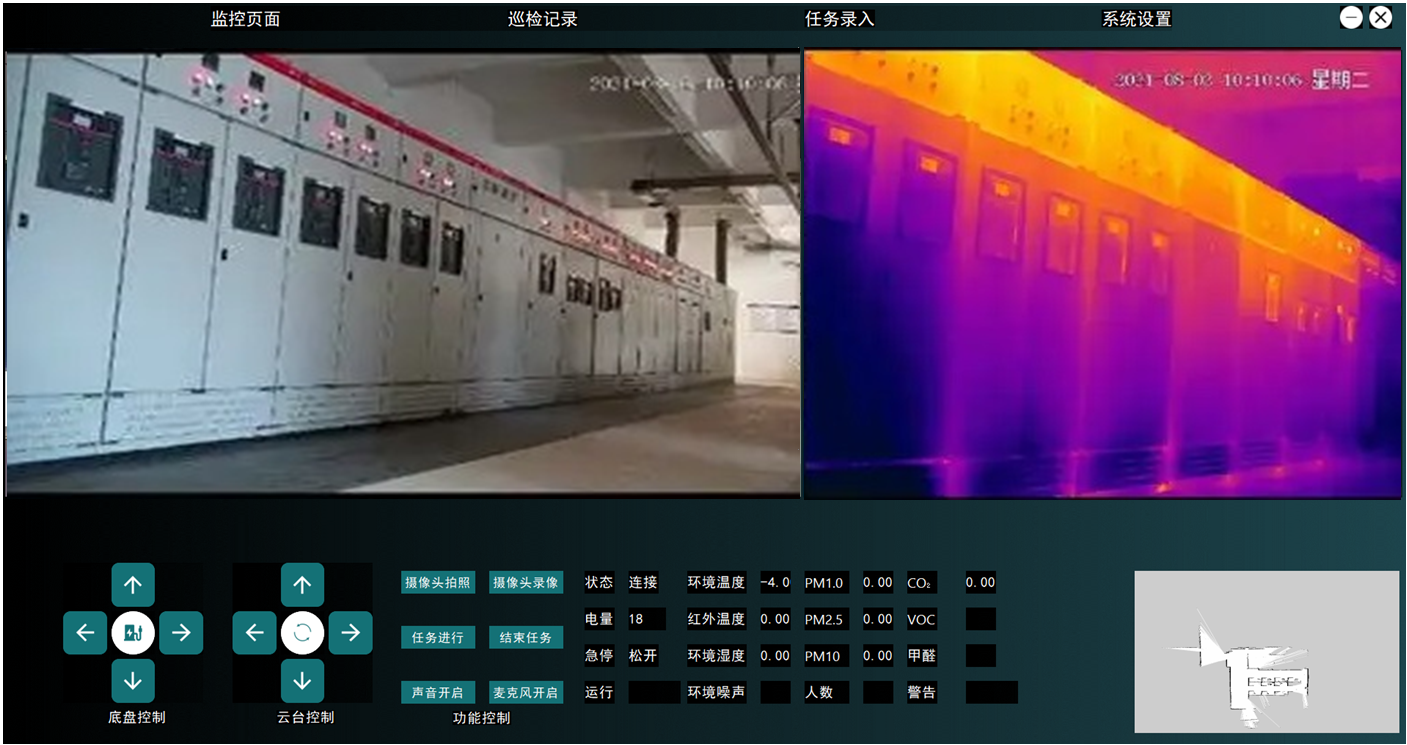
智能采集 網(wǎng)絡(luò)傳輸 智能終端 巡檢機器人 可視化 -
產(chǎn)業(yè)數(shù)字化
協(xié)同制造服務(wù) 數(shù)字工廠服務(wù) 數(shù)字營銷服務(wù) 數(shù)字園區(qū)服務(wù) -
產(chǎn)教融合
人工智能實訓(xùn)平臺 大數(shù)據(jù)實訓(xùn)平臺 物聯(lián)網(wǎng)實訓(xùn)平臺 工業(yè)互聯(lián)網(wǎng)實訓(xùn)平臺 網(wǎng)絡(luò)安全實訓(xùn)平臺 工業(yè)機器人
-
- 解決方案
- 新聞資訊
- 關(guān)于我們
- 科工云網(wǎng)